Points clouds editing
Specific selection tools are available for editing point clouds.
Points clouds selection
The first set of commands allow to perform a selection of points cloud that helps with Delete commands to delete an area of the point cloud.
Click Cloud.
Click Rectangle screen to perform a rectangular selection of the point cloud.

Click Circle screen to select points by defining a circular area of the screen.

Click Polygon screen to select points by defining a closed polygon on the screen.

Click Polyline to select point by specifying an existing polyline.


Click Cancel to cancel current selection.

Points clouds delete
After the points have been selected it is possible to proceed deleting the points.
Click Delete inside to delete the points inside the current selection.

Click Delete outside to delete the points outside the current selection.

Click Restore to restore the original point cloud.

Points clouds divide
The command Divide allows to cut the points cloud selection in a new point cloud.
Click Divide.

Enter the name of the new points cloud.
The selection is cut in a new points cloud, available in the Project Manager.
Points clouds copy
The command Copy allows to copy the points cloud selection in a new point cloud.
Click Copy.

Enter the name of the new points cloud.
The selection is copied in a new points cloud, available in the Project Manager.
Merge clouds
The command creates a new point cloud starting from existing points clouds.
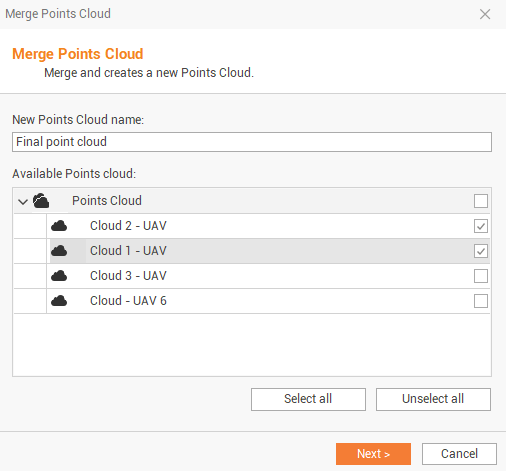
Click Merge cloud.

Select in the new window the points clouds to merge and enter the new point clouds name.
Select the merge parameters.
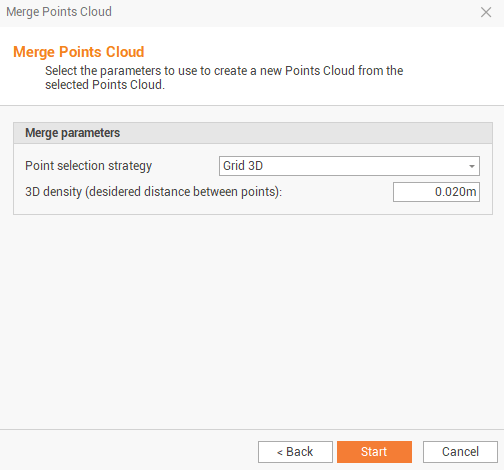
Point selection strategy:
Grid 3D: the merged point will have points selected from a gird 3D, the density is selected in the field 3D density.
Decimation: the merged point cloud is decimated using a Decimation value.
All points: all points available are used.
Click Start to merge the points clouds and generate a new one in the Project Manager.
This function can also be used to decimate a single point cloud if in the point cloud selection, a single point cloud is selected.