IMU initialization
 |
|  |
| 
IMU rely on movement to provide useful data.
Gyroscopes and accelerometers are the sensors in IMU. These sensors have small errors that accumulate over time (drift).
When the receiver is moving, the GNSS-IMU fusion algorithm corrects these errors using GNSS position.
The initialization process is used to correct the errors using the GNSS position.
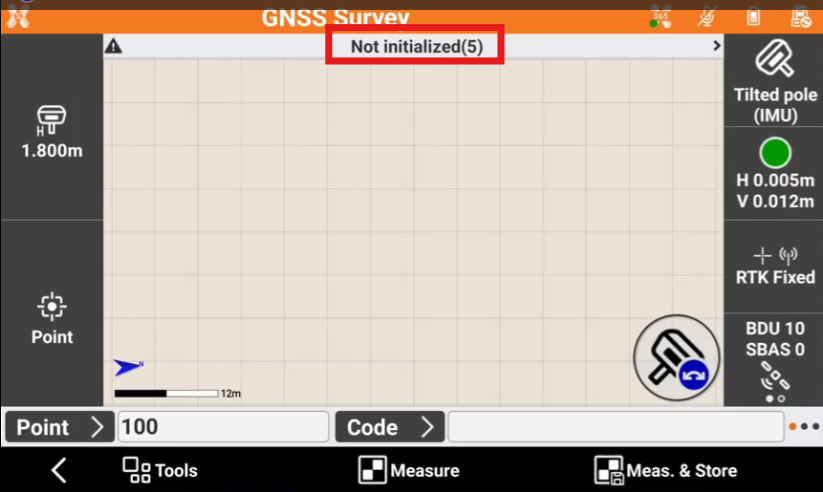
When the IMU is enabled, usually the status is not initialized.
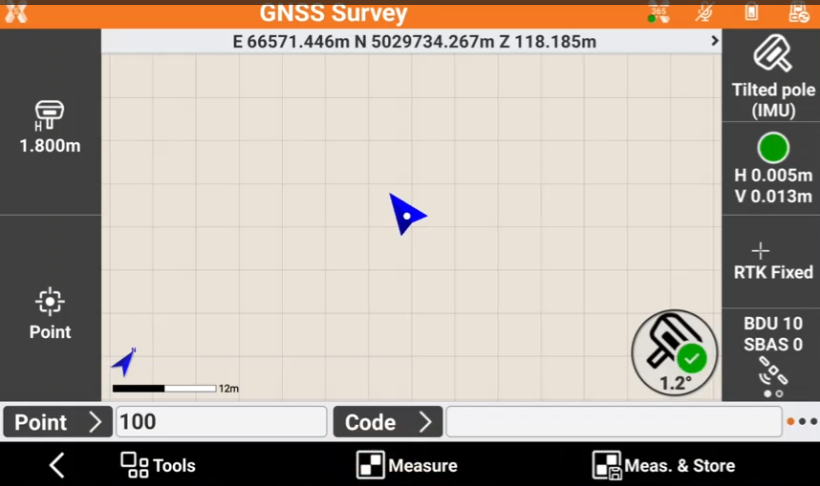
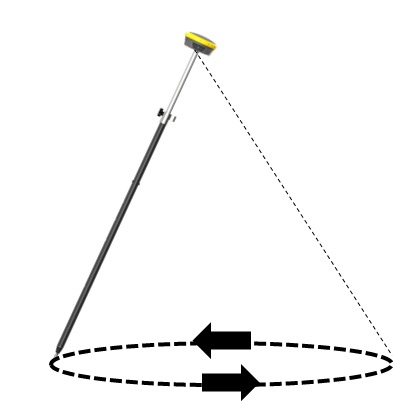
Wait until the GNSS receiver is fix and then start to walk and move the GNSS receiver, in few moments the receiver will be ready to be used.
In the GNSS receiver is new or has not been used since several time, a possible message is Magnetic calibration required. In this case this movement is helpful to speed up the inizialization process.
Below video shows the procedure to activate and inizialize the IMU.