Working with Terrastar PPP corrections
 |
|  |
| 
This guide affects Zenith16, Zenith40 and Zenith60. These models allow to receive PPP corrections from Terraster C-PRO service to work with centimeter accuracy and RTK corrections from satellites.
This guide is a reference for using the PPP service of the Zenith16/Zenith40/Zenith60 in combination of X-PAD.
What is PPP?
PPP is a positioning technique that removes or models GNSS system errors to provide a high level of position accuracy from a single receiver, without the use of a GNSS base.
A PPP solution depends on GNSS satellite clock and orbit corrections, generated from a network of global reference stations. Once the corrections are calculated, they are delivered to the end user via satellite. These corrections are used by the receiver to obtain a centimeter accuracy, depending on the selected service without any GNSS local base station.
PPP solution requires a period to converge to desired accuracy to resolve any local biases such as the atmospheric conditions, multipath environment and satellite geometry. The actual accuracy achieved, and the convergence time required is dependent on the quality of the corrections and how they are applied in the receiver. Up to 3 cm accuracy is possible.
In Zenith16/40/60 PPP can be used standalone, to work with centimeter accuracy where a base or NTRIP is not available, or in combination with a standard RTK, to operate when the RTK data-link is down.
Hexagon Terrastar service
Zenith40/60 uses the PPP service provided by Terrastar.
TerraStar, a Hexagon company, is a global leader in satellites-based correction services for land and near-shore applications and owns, operates, maintains and controls its global network.
24/7/365, all weather, correction services
Various service levels at different performance levels are available. With its OEM7 Measurement Engine, Zenith40/60 classifies for “TerraStar C-Pro”, providing highest accuracy.
How to order Terraster or request a demo
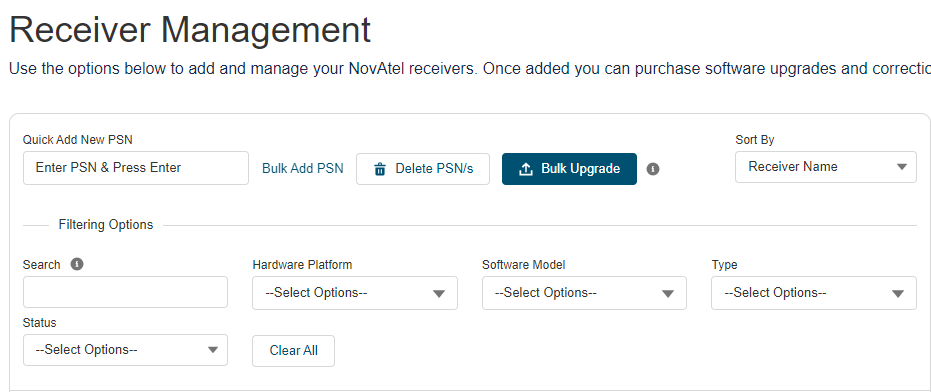
Open and create an account at NovAtel eStore
Open My Products and Receivers.
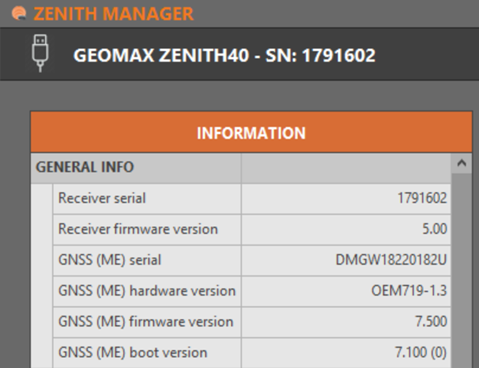
Enter the PSN of the receiver.
The PSN of your receiver is the Serial Number of the ME board built in. For the Zenith16/40, you can find the information using the Zenith Manager app for PC or Tablet.
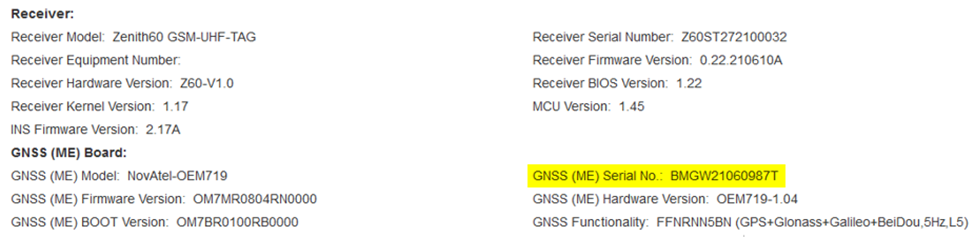
For the Zenith60 you can find that information connecting to the web interface and checking the value in the Hardware Info page. For more information on how to connect to Zenith60 web interface, refer to the Zenith60 guide.
Enter the PSN to register the GNSS receiver and click Details.
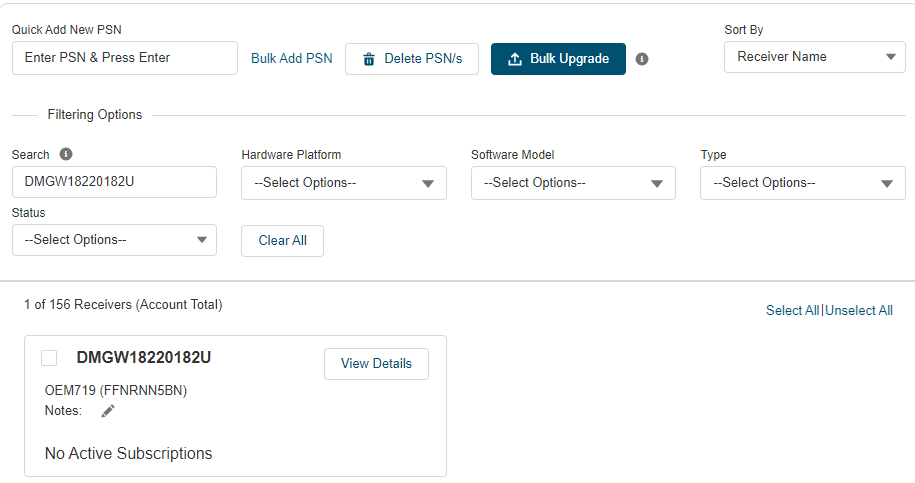
In this view you will see the receiver’s details regarding current model and its correction service compatibilities and are able to perform various actions.
Click on PURCHASE NOW on the Terrastar C PRO product to start the ordering process.
After clicking on “Purchase Now”, you can select the service coverage (can be regional limited to a single country or global) and the service duration (3 months, 1 or more years).
Select if to activate the service immediately or from a defined date. Then proceed with service payment.
Each GNSS receiver includes 3 x 5-days demo licenses. To request the demo license, from the Details page click Learn more and Request a free demo.

PPP Profile configuration in X-PAD
To use the PPP in X-PAD software the first step is to configure a rover GNSS profile to use PPP.
PPP can be used in 2 modes: as standalone system to obtain a cm accuracy, or as support to an RTK connection as backup.
In the 2 configuration it is necessary to activate the option PPP (Precise Point Positioning) in the GNSS profile.
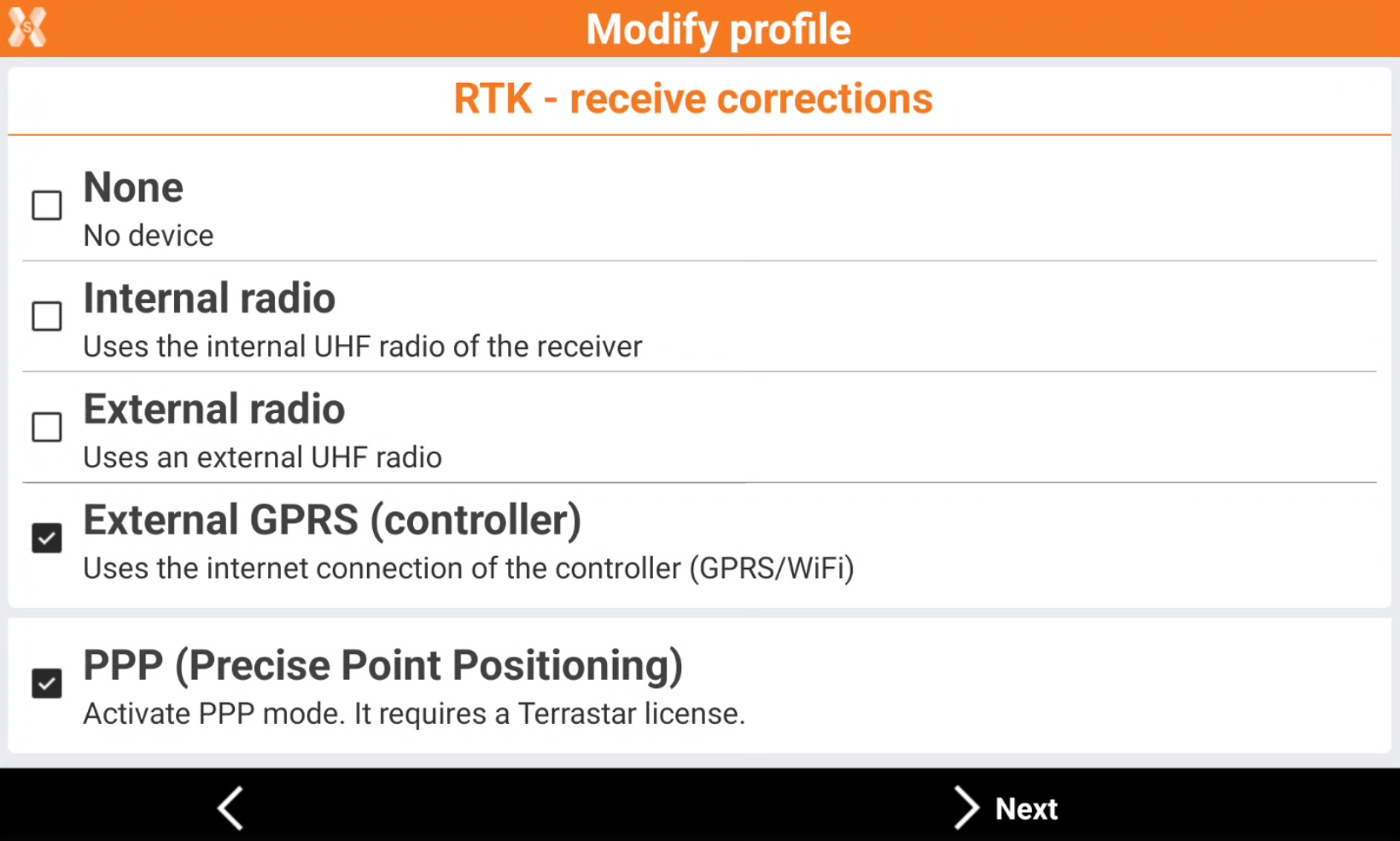
If the rover is used only with PPP corrections, it is possible to select None and PPP.
If the rover is used with RTK corrections, it is possible to select the RTK correction method (UHF or internet) and PPP. In this case PPP will be available when the RTK datalink is not available as backup system.
First PPP activation using X-PAD
The authorization to use Terrastar is sent by the satellites to the receiver.
To activate the PPP service, we must wait that the authorization is provided from the satellite to the unit. This requires maximum 3-4 hours of continuous satellite tracking by our unit, but in general it is activated within 10-15 minutes.
To activate the first time the PPP:
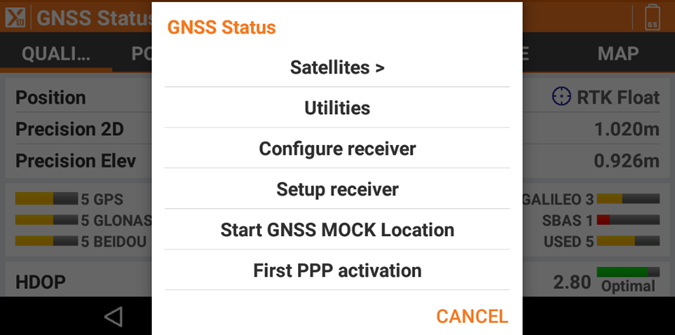
· Open GNSS status page (the current profile must have PPP mode checked)
· Click TOOLS and select First PPP activation.
Leave the receiver to track satellites. It is not necessary to have X-PAD connected in this step.
If there are problems to activate the PPP license, it is possible to resend the authentication code from https://shop.novatel.com/
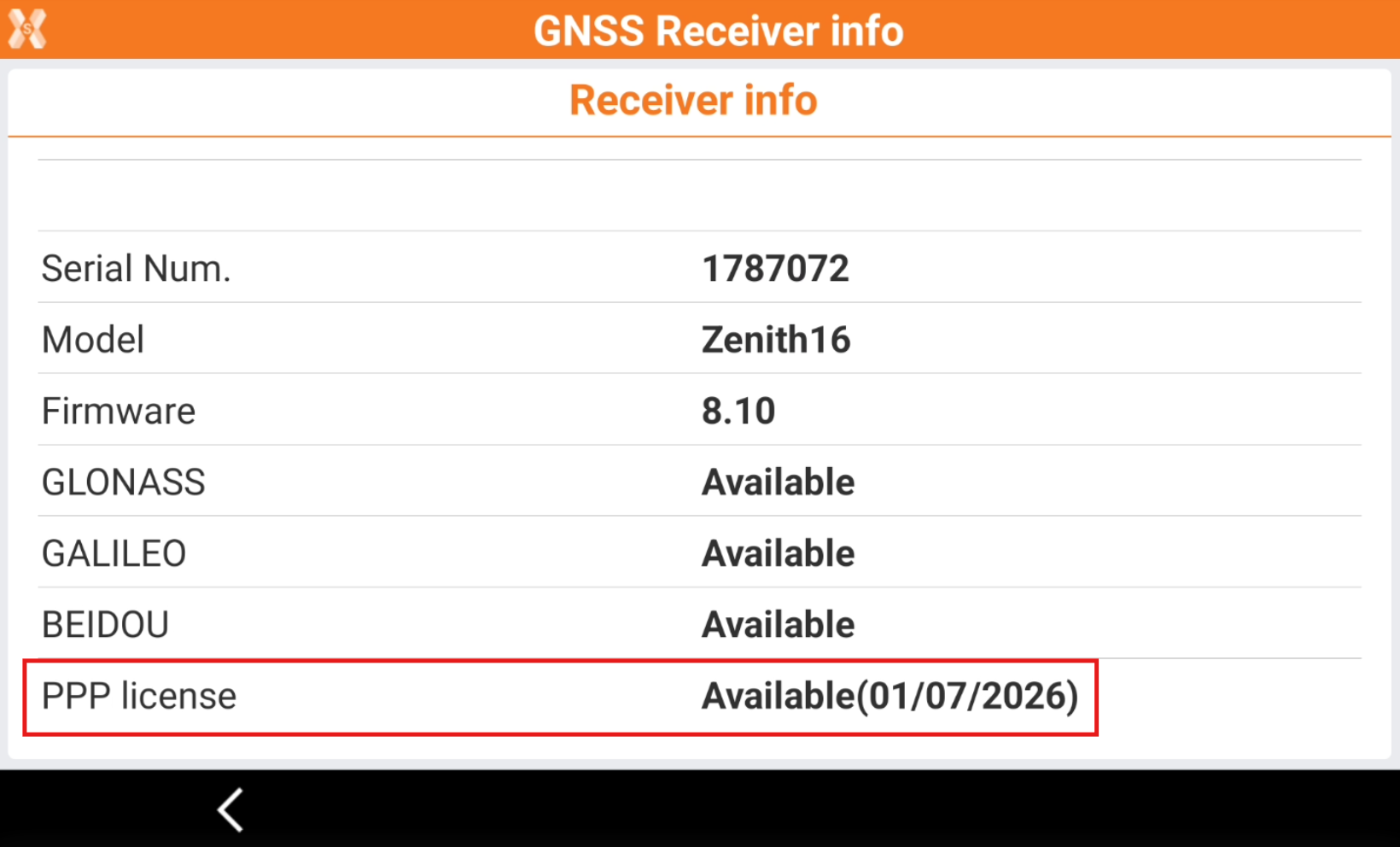
From GPS info page it is possible to check if the PPP service is available, in case the row First PPP activation will appear it means that the system is not ready yet.
X-PAD PPP Manager
PPP works in a different reference frame compared to the RTK systems we are used to use.
This means that the WGS84 latitude and longitude of the same point measured with RTK (for example the CORS network) and the latitude and longitude measured with PPP have a small difference.
PPP and CORS network reference frames differ primarily because PPP solutions are independent and align directly with a global frame, while CORS networks are ground-based and their frame is defined by the network of physical stations. The PPP system is aligned with the International Terrestrial Reference Frame (ITRF) while CORS network reference stations are usually in the national reference frame (for example in Europe the national networks are aligned to the ETRF, the European Terrestrial Reference Frame, which is a regional realization of the global ITRF and differs from it).
If we want to operate in the same reference frame, using PPP and a different reference frame (for example because we are want to work in a cartographic system with CORS network), it is important that X-PAD calculate correctly the delta between the 2 frames.
To do this X-PAD has a step-by-step procedure to simplify all the procedure.
The first time you open an application, you will see a popup message informing if you want to do a system calibration.
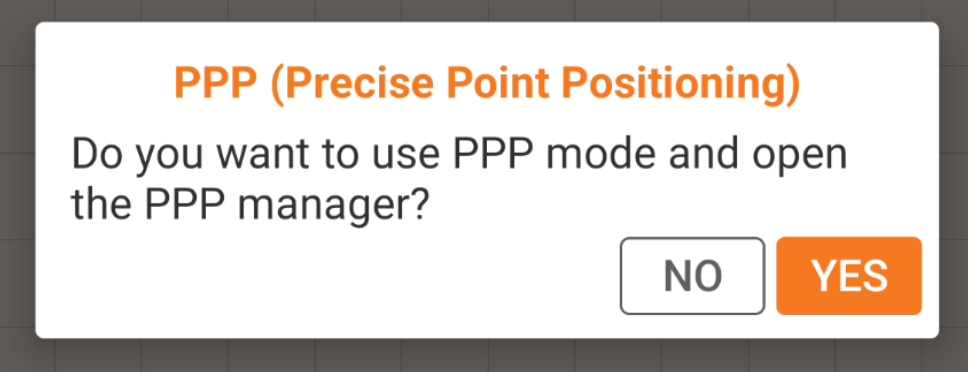
Click YES to open the PPP Manager where you can find the position adjustments between the PPP reference frame and the RTK frame.
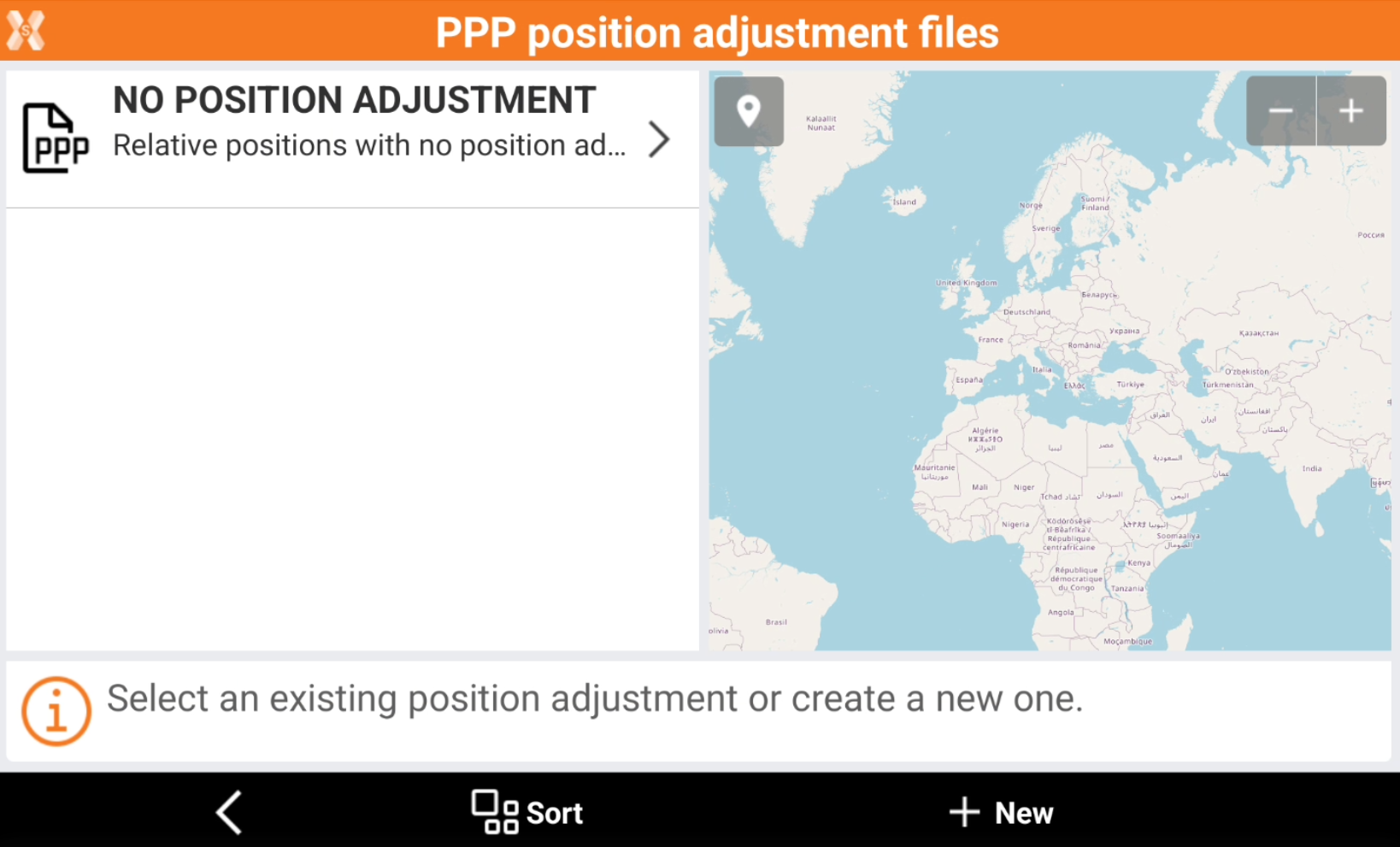
This page shows the existing adjustments done using the receiver and X-PAD and allows to create a new adjustment.
Select how to proceed:
Select an existing adjustment, if these two criteria are satisfied:
The data of creation is no older than 2 months.
The difference from the position where the calibration was done, and the current receiver position are less than 50km.
Click New to start a new position adjustment. This position adjustment will calculate the differences between the PPP system and the RTK system.
If instead we want to do a relative system, only with PPP, we don’t need any position adjustment. In this case click on NO POSITION ADJUSTMENT and proceed with the PPP survey.
If an adjustment is activated, the PPP manager will be closed, the PPP shifting will load and apply to every measurement done with PPP service.
PPP manager it’s now still accessible by Tools button of GNSS Status page, where, an option called PPP allow to open it or deactivate PPP positioning adjustment.
Create a new PPP position adjustment
If we want to have the PPP and the RTK in the same system, click on New to start the step-by-step procedure.
Select how the adjustment is performed.
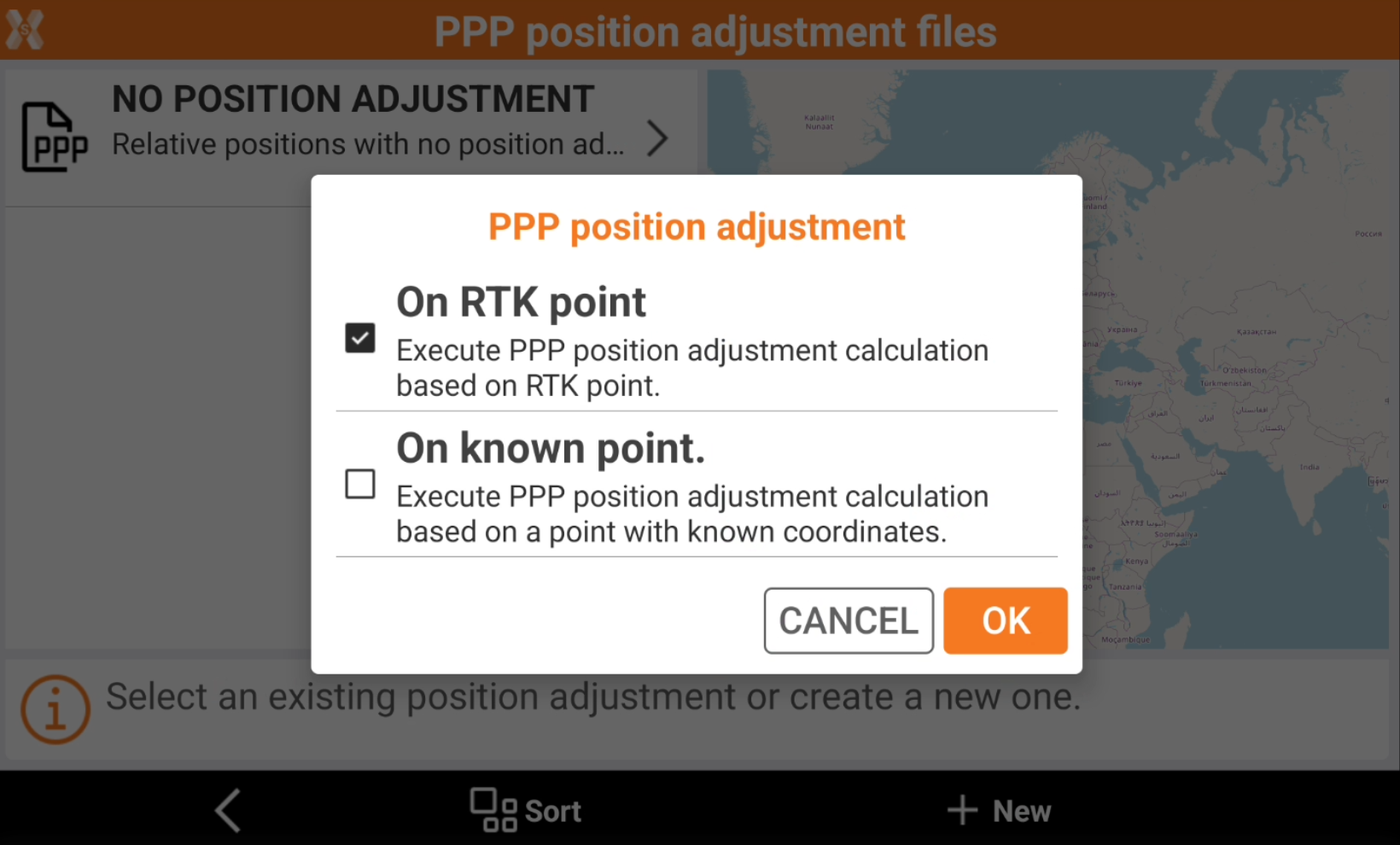
RTK position: the coordinates of the point are obtained from an average of a GNSS positions with the right accuracy. It’s possible than the current instrument profile isn’t an RTK profile. A message in this case appear and user can choose another profile with the same Bluetooth address and RTK.
Known point: the coordinates of the point are inserted by the user.
In the adjustment procedure the receiver must be stable on the same position of the point measured in RTK or taken from the database, and to speed up the procedure must be on an open sky position.
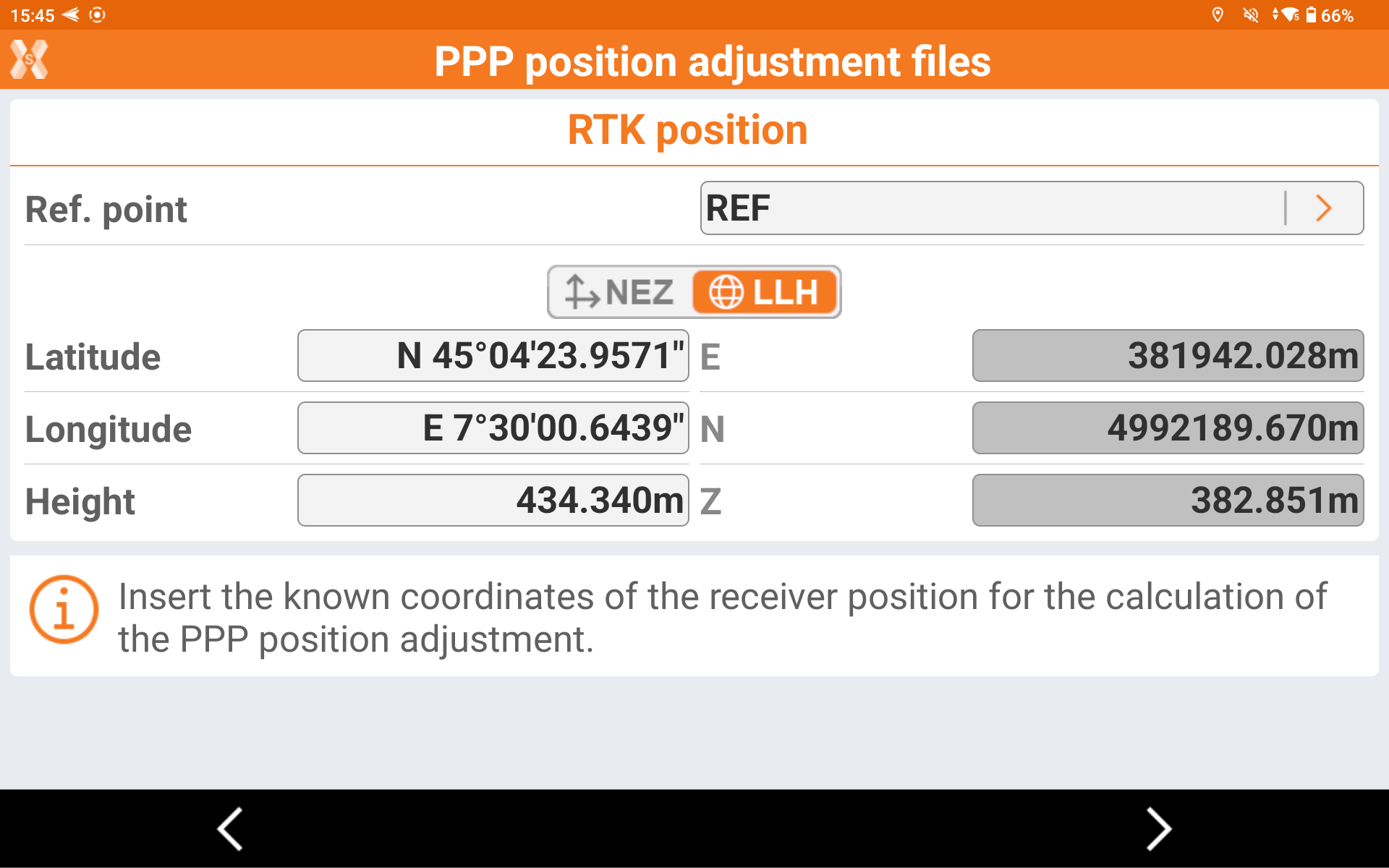
Select the PPP adjustment method.
If the selected method is known point, select from the job point list or enter the coordinate of the known coordinate.
If the selected method is RTK, select the RTK data parameters.
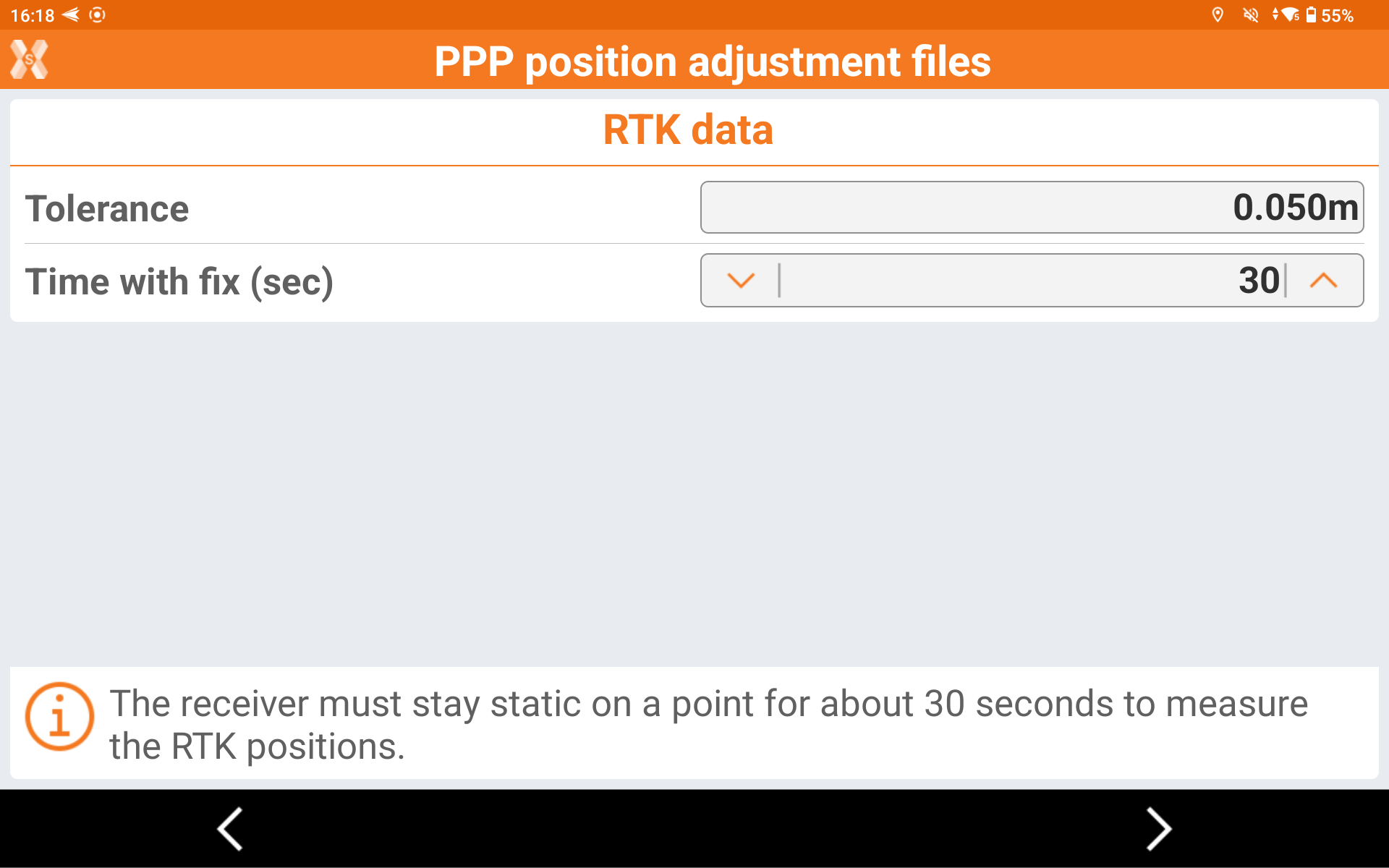
Tolerance: the precision value below which the point is measured in RTK mode.
Time with fix (sec): how many seconds the point is measured in RTK mode.
In both method the software has the coordinate of the position in the current reference frame.
In the following step, the receiver measure the same point using the PPP corrections.
Enter the adjustment parameters.
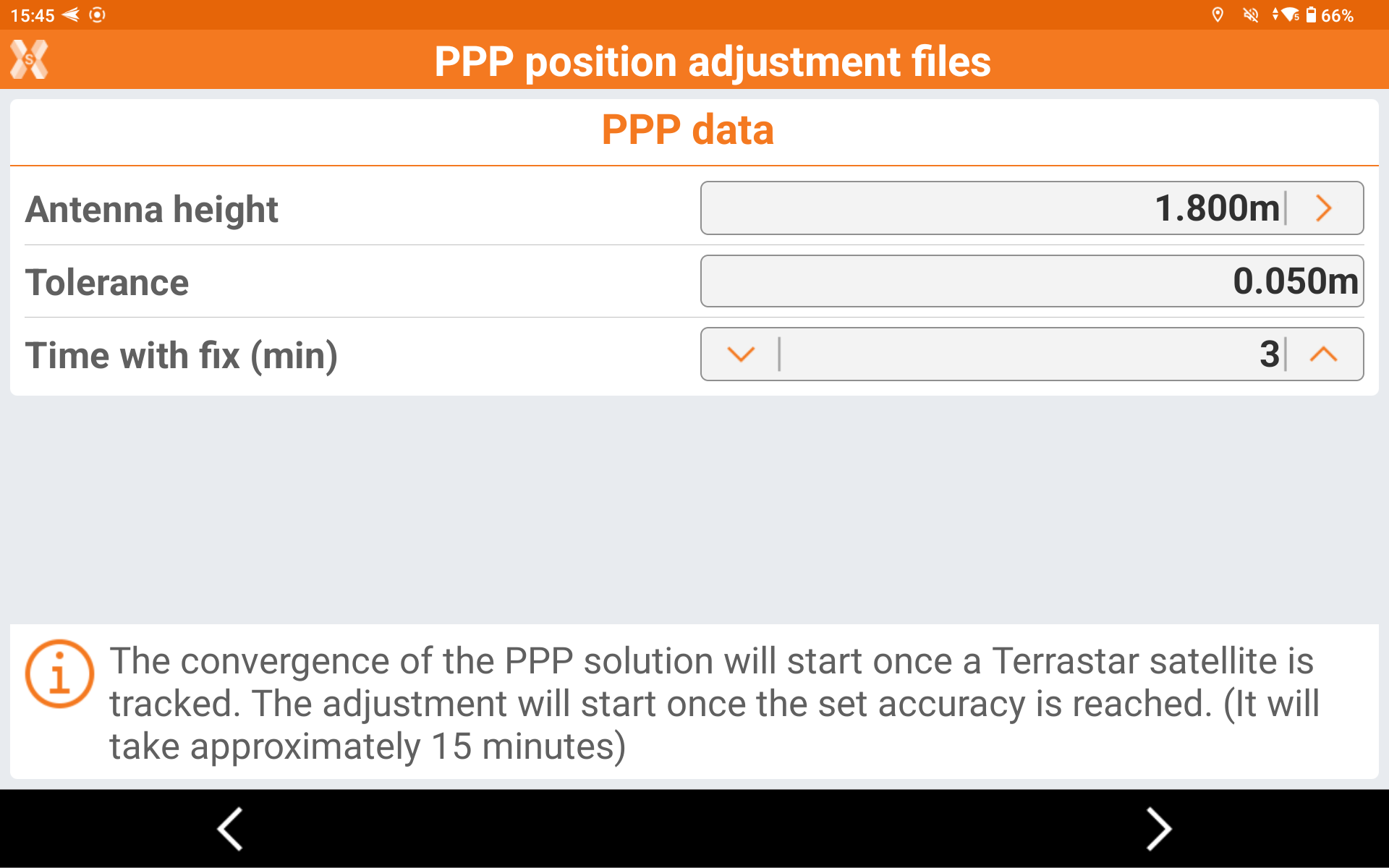
Antenna height: the antenna height over the known coordinate.
Tolerance: the precision value below which the point is measured in PPP mode.
Time with fix (min): how many minute the point is measured in PPP mode.
Click Next.
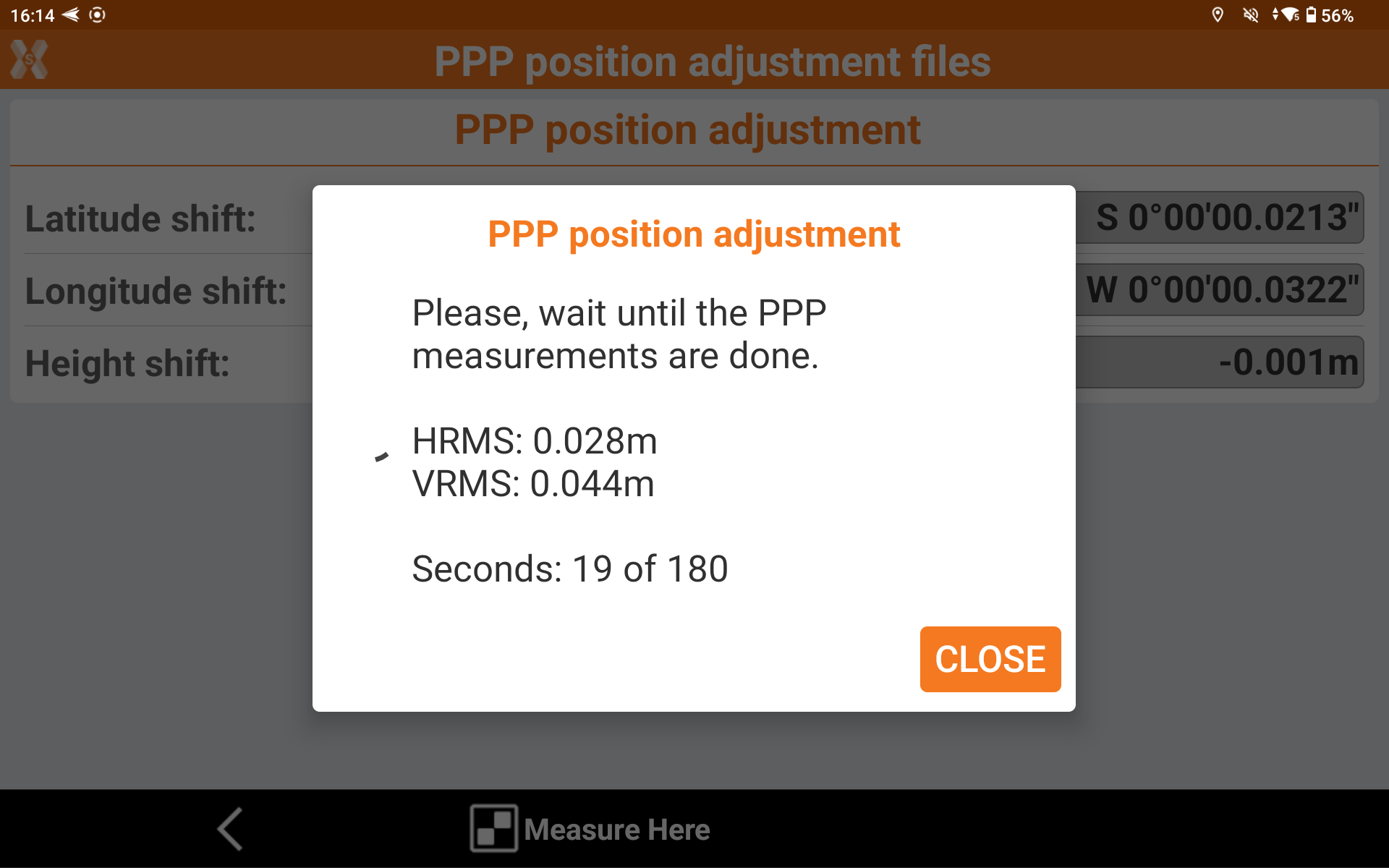
The receiver starts to track Terrastar satellites and converge the solution to PPP fix.
When the solution is converged and error is below the entered Tolerance, the software records positions for the defined Time with fix.
At the end of the procedure, the software calculate the shift between the local reference frame and the international reference frame.
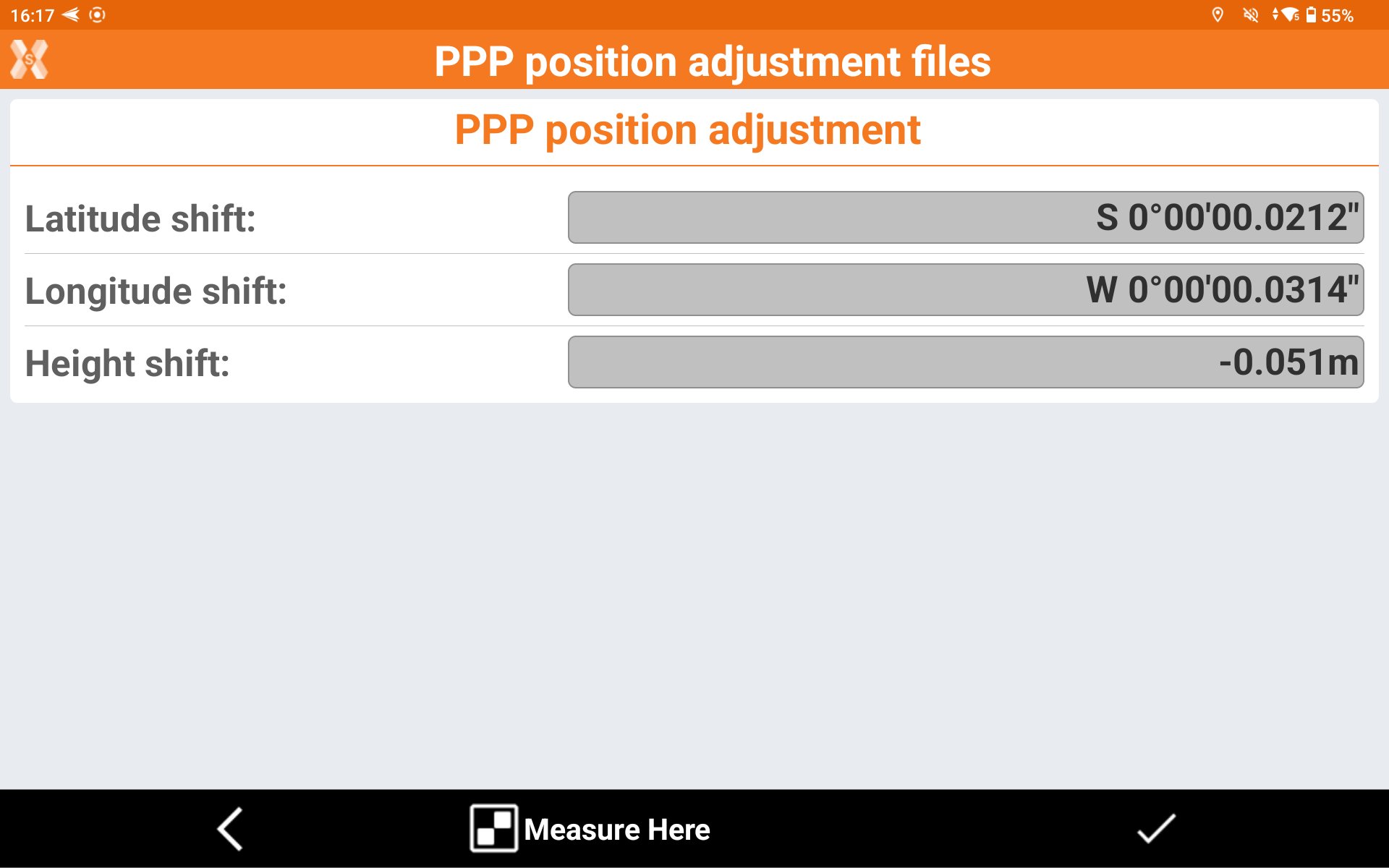
Click End to save the result with a name.
The PPP adjustment is now saved in the PPP manager, and can be selected and used in different jobs.

This calibration is stored in X-PAD, so it is not necessary to re-calibrate again if working in the same area.
An adjustment it’s valid when:
The data of creation is no older than 2 months,
The difference from the position where the calibration was done, and the current receiver position are less than 50km
If these 2 conditions are not valid, a new adjustment must be performed.
Working with PPP without RTK step-by-step
PPP can be used to operate in areas where the RTK is not available. In this case we can use PPP to obtain cm accuracy without RTK corrections.
After the GNSS profile has been created and the first activation completed, we are ready to use the receiver in this mode.
Open an application (for example Survey) and X-PAD will propose if we want to use a PPP position adjustment.
If we want to work in the same reference frame of a known coordinate, select or create a position adjustment (refer to previous paragraph).
Otherwise in the select NO POSITION ADJUSTMENT to work in relative coordinates.
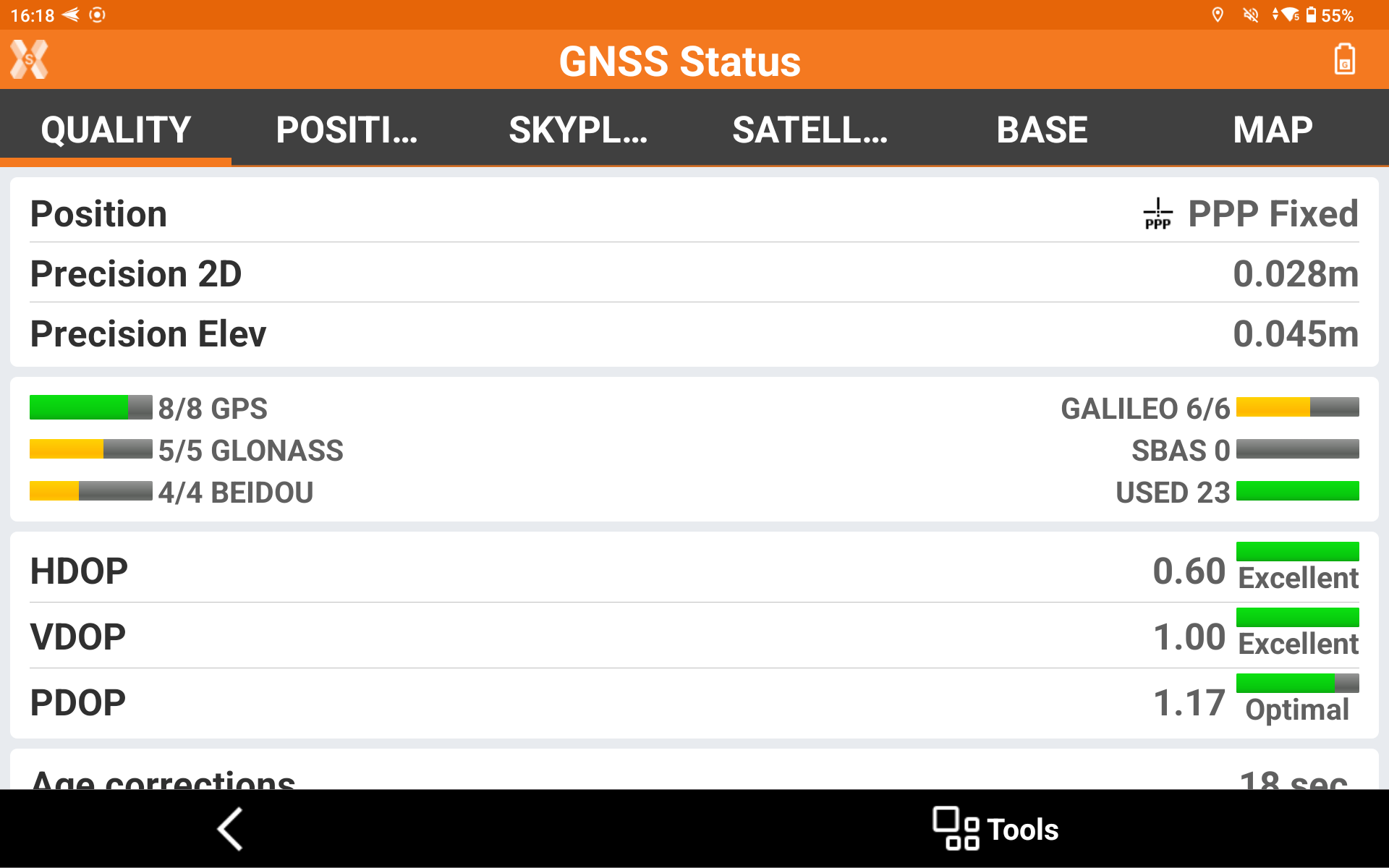
When the system converges, we will be able to measure and store point in the PPP-Fixed status.
Working with PPP with RTK step-by-step
PPP can also be used in combination with a RTK data-link to be a backup in case the RTK service is down. For example, if we use a RTK to a CORS network, we can use PPP to backup the RTK connection when internet is not available.
To work in this mode, we must create a RTK profile with enabled PPP and an RTK data-link, like in the picture below.
Open an application (for example Survey) and X-PAD will propose if we want to use a PPP position adjustment.
In this case, since we are working with RTK and PPP, it is recommended to perform a position adjustment, to be sure that PPP coordinates and RTK coordinates are referred on the same reference frame; means that same point measured in PPP and RTK must have same latitude and longitude (refer to previous paragraph on how to perform an adjustment).
When working with RTK+PPP, if the RTK position is available it will be used; as soon as the RTK is down, the PPP will be automatically used in case the PPP solution provides better accuracy then the RTK solution.
The positioning algorithm will always output the coordinate with best accuracy. That means that the algorithm compares the accuracy of the PPP solution and the RTK solution, and automatically proposes the solution with the best accuracy.
When the RTK datalink is again available, and the RTK accuracy is better than the PPP, X-PAD automatically will switch again to RTK.